第2章 机构的结构分析
2-2机构的组成及分类
构件(link)
机器中每一个独立的运动单元体称为一个构件
运动副(kinematic pair)
- 由两个构件直接接触而组成的可动的连接
- 运动副元素:上述两构件上能够参加接触而构成运动副的表面
- 根据接触情况分类:
- 高副:通过单一点或线接触而构成的运动副
- 低副:通过面接触而构成的副
- 根据封闭方式分类:
- 几何封闭/形封闭运动副
- 力封闭运动副
- 根据构成运动副的两构件之间相对运动分类:
- 转动副/回转副/铰链
- 移动副
- 螺旋副
- 球面副
- 根据空间分类:
- 平面运动副
- 空间运动副
运动链(kinematic chain)
构件通过运动副的连接而构成的可相对运动的系统
机构
在运动链中,如果将其中某一构件加以固定而成为机架(fixed link),则该运动链便成为机构
原动件(主动件):机构中按给定的已知运动规律独立运动的构件
从动件:主动件外其余活动构件
2-3机构运动简图
kinematic diagram of mechanism
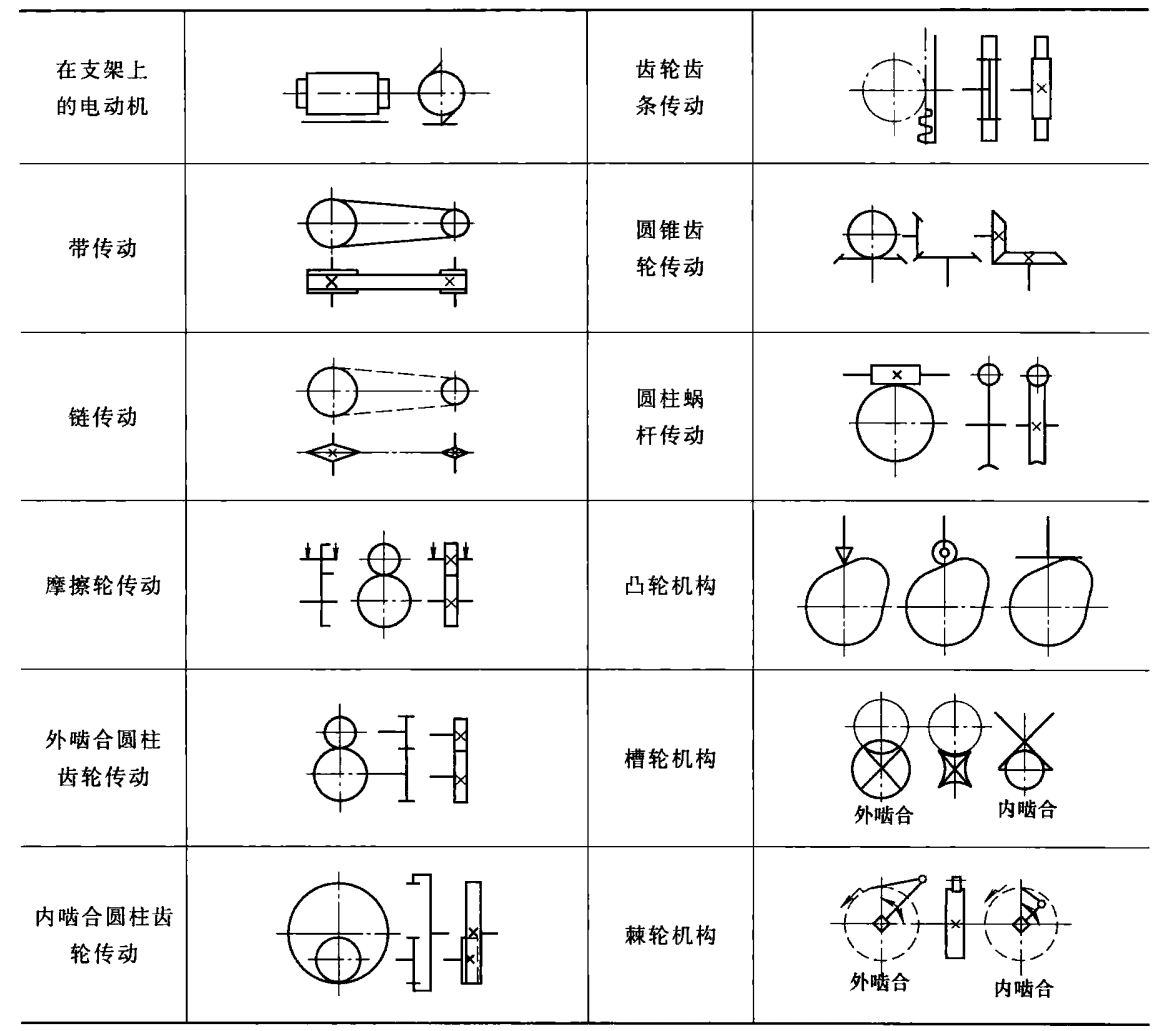
用以表示机构运动传递情况的简化图形:
根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,用运动副及常用机构运动简图的代表符号和一般构件的表示方法将机构的运动传递情况表示出来
2-4机构具有确定运动的条件及最小阻力定律
欠驱机构:原动件数小于机构自由度的机构
冗驱机构:原动件数多于机构自由度的机构
2-5,2-6机构自由度的计算
自由度 = 3 * 活动构件数 - (2 * 低副数 + 高副数 - 虚约束数) - 局部自由度
复合铰链:
m个构件在同一连接处构成复合铰链(),则共有()个转动副。
复合高副:
如果两构件在多处相接触构成平面高副,而在各接触点处的公法线方向彼此不重合,就构成了符合高副,相当于一个低副。
局部自由度
在有些机构中,某些构件所产生的局部运动并不影响其他构件的运动,则称这种局部运动的自由度为局部自由度。
如滚子推杆凸轮机构中,滚子绕其自身轴线的转动并不影响其他构件的运动,只是一种局部自由度。
虚约束
有些运动副带入的约束对机构的运动只起重复约束作用,特把这类约束称为虚约束(redundant constraint)